Propuesta:
Control predictivo óptimo basado en modelos LPV con reparametrización de la predicción de las entradas aplicado a sistemas mecatrónicos.Responsable(s):
Guillermo Valencia PalomoSede:
Tecnológico de HermosilloContacto:
gvalencia@hermosillo.tecnm.mxEl control predictivo (MPC) es una técnica de control bien establecida en la literatura de control automático que reporta cientos de aplicaciones exitosas en la industria. La idea básica del MPC es el cálculo de la acción de control en cada instante de muestreo a través de la solución de un problema de optimización, el cual se escribe en términos de un modelo de predicción . Utiliza una función de costo para considerar el objetivo de control como regulación o rechazo de perturbaciones. Su formulación permite considerar restricciones en la entrada, salida o estados del sistema en el proceso de diseño, lo cual es uno de los principales atractivos de esta técnica de control.
Con el fin de tener un mayor impacto en la evolución de las variables a pesar de tener horizontes de control pequeños, la propuesta de tesis se basa en retomar un enfoque que tuvo mucho éxito en el MPC para LTI que plantea reparametrizar la secuencia de entrada con funciones ortogonales convergentes y aplicarla en el caso de sistemas LPV. El MPC tradicional considera que las entradas calculadas tienen impacto sobre una muestra, es decir cada valor calculado de la entrada se aplica en la muestra que le corresponde, dicho de otra manera, el vector de entradas futuras se multiplica por una matriz identidad unitaria. Al cambiar esta matriz por una matriz de funciones convergentes el impacto de cada valor calculado de la entrada es mucho mayor en el tiempo, por lo que con horizontes pequeños es posible tener el efecto de horizontes más grandes.
Propuesta:
Control colaborativo tolerante a fallas robusto de robots móbilesResponsable(s):
Dr. Francisco Ronay López EstradaSede:
I.T. de Tuxtla GutiérrezContacto:
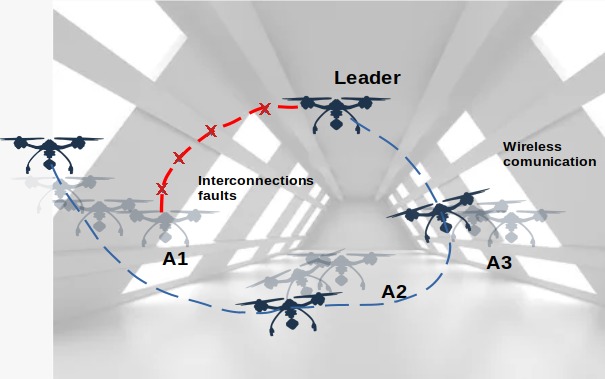
frlopez@tuxtla.tecnm.mxConsensus control is fundamental in the study of collaborative control, and its objective is to design distributed controllers to make a group of agents converges to a common state. Its applications range from cooperative control of autonomous vehicles to formation control of air and ground vehicles, among others. This works will be dedicated to study fault-tolerant control consensus protocols for collaborative robots subject to actuator, sensor and interconnection faults. Mixed robust techniques will be explored in order to guarantee the robustness of the algorithms against noise, disturbances and uncertainties. These combined techniques have proven to be effective on FTC control for a single agent, and this thesis will explore their application to collaborative robots.

Propuesta:
Estrategias de control para el vuelo en formación no holonómico de cuadrirrotores transportando una cargaResponsable(s):
Dra. Maria Eusebia Guerrero SánchezSede:
I.T. de HermosilloContacto:
maria.guerreros@hermosillo.tecnm.mxEn este tema de tesis se propone diseñar esquemas de control no lineales para la navegación en formación no holonómica de múltiples cuadrirrotores transportando una carga. Este problema ha sido ampliamente tratado usando solamente un VANT. Sin embargo, muchas de las aplicaciones del transporte aéreo están muy limitadas, debido a la viabilidad de llevar una carga que es demasiado pesada para la capacidad de empuje de un solo vehículo, también con múltiples VANTs existe la posibilidad de aumentar la redundancia, la seguridad, de superar las limitaciones físicas que se presenta con un solo vehículo y lograr tareas más sofisticadas. Además, el considerar un escuadrón de agentes es un reto mayor, debido a que complica el diseño de las estrategias de control, ya que los controladores deben ser lo suficientemente robustos para seguir una trayectoria deseada bajo cambios de carga y para lidiar con las fuerzas que cada agente ejerce sobre los demás.
Download Full Proposal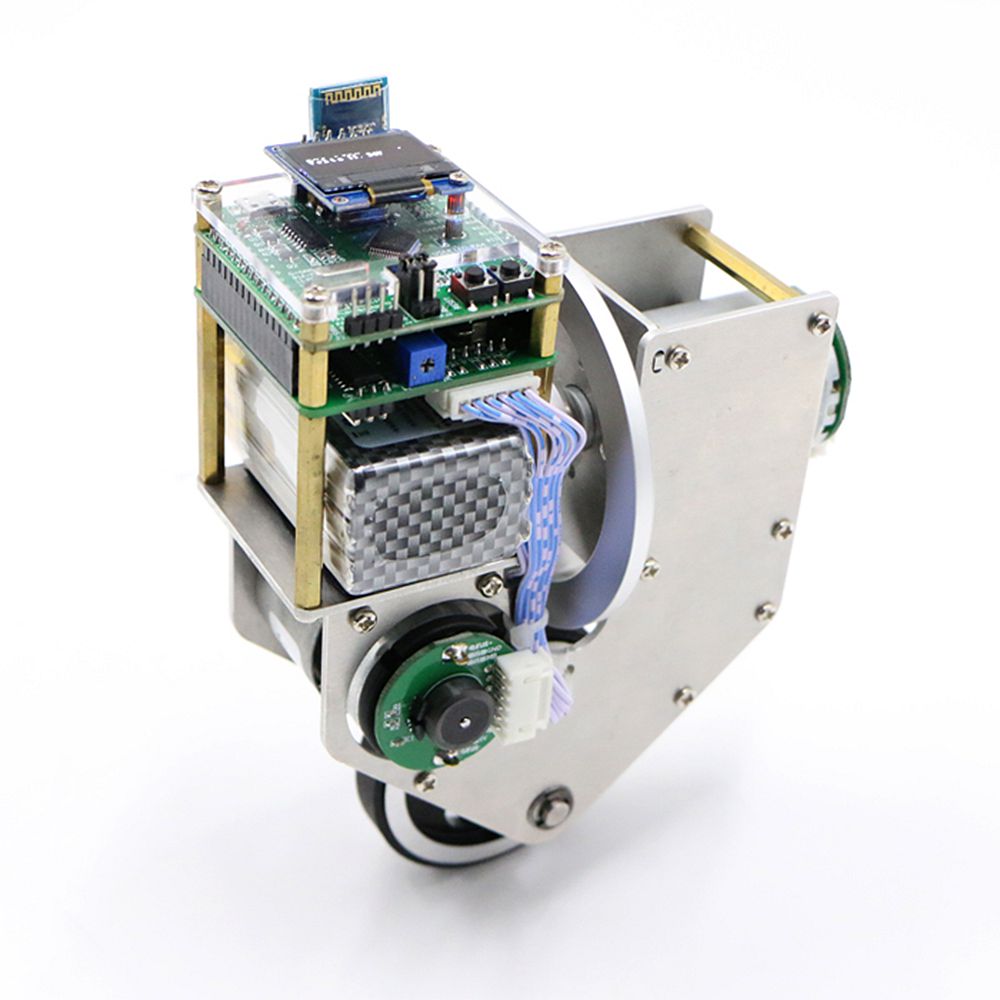
Propuesta:
Estrategias de control tolerante a fallas en sistemas subactuados mediante un enfoque MPC-LPVResponsable(s):
Dr. Guillermo Valencia PalomoSede:
HermosilloContacto:
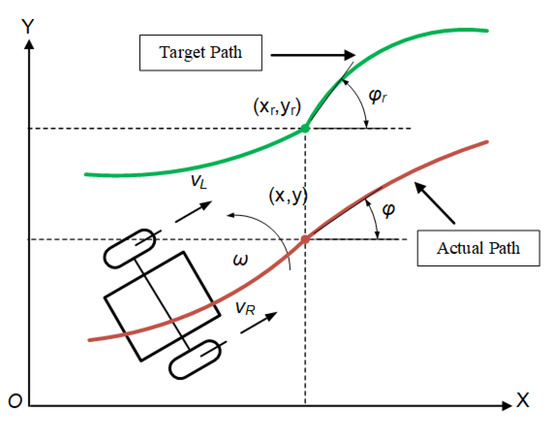
gvalencia@hermosillo.tecnm.mxEste trabajo busca explorar esquemas de control tolerante a fallas en sistemas subactuados como vehículos móviles, en donde las condiciones no holonómicas complican en la redistribución del control al no contar con redundancia física. Esta redundancia se busca alcanzar mediante condiciones analíticas a través de observadores de estado robustos. Parte del problema de investigación consistirá en determinar cuál es el mejor esquema de robustez que se adapte a los controladores predictivos, ya sea a través de esquemas $H_\infty$ o mediante zonotópes. En cualquier caso, se buscará que el controlador sea robusto no solo a perturbaciones externa y ruido de medición; sino también a incertidumbres de modelado. Con ello se espera encontrar condiciones suficientes que garanticen la seguridad y confiabilidad del sistema subactuado. El caso de estudio se determinará a lo largo del estudio, puesto que existen múltiples sistemas subactuados que podrían ser candidatos, como vehículos móviles, una grúa mecánica. Es importante mencionar que la principal contribución del trabajo busca ser teórica, por lo cual el no contar con un caso de estudio particular dejará libertad de explorar enfoques novedosos desde el punto de vista de estudio de sistemas LPV-MPC.
Download Full Proposal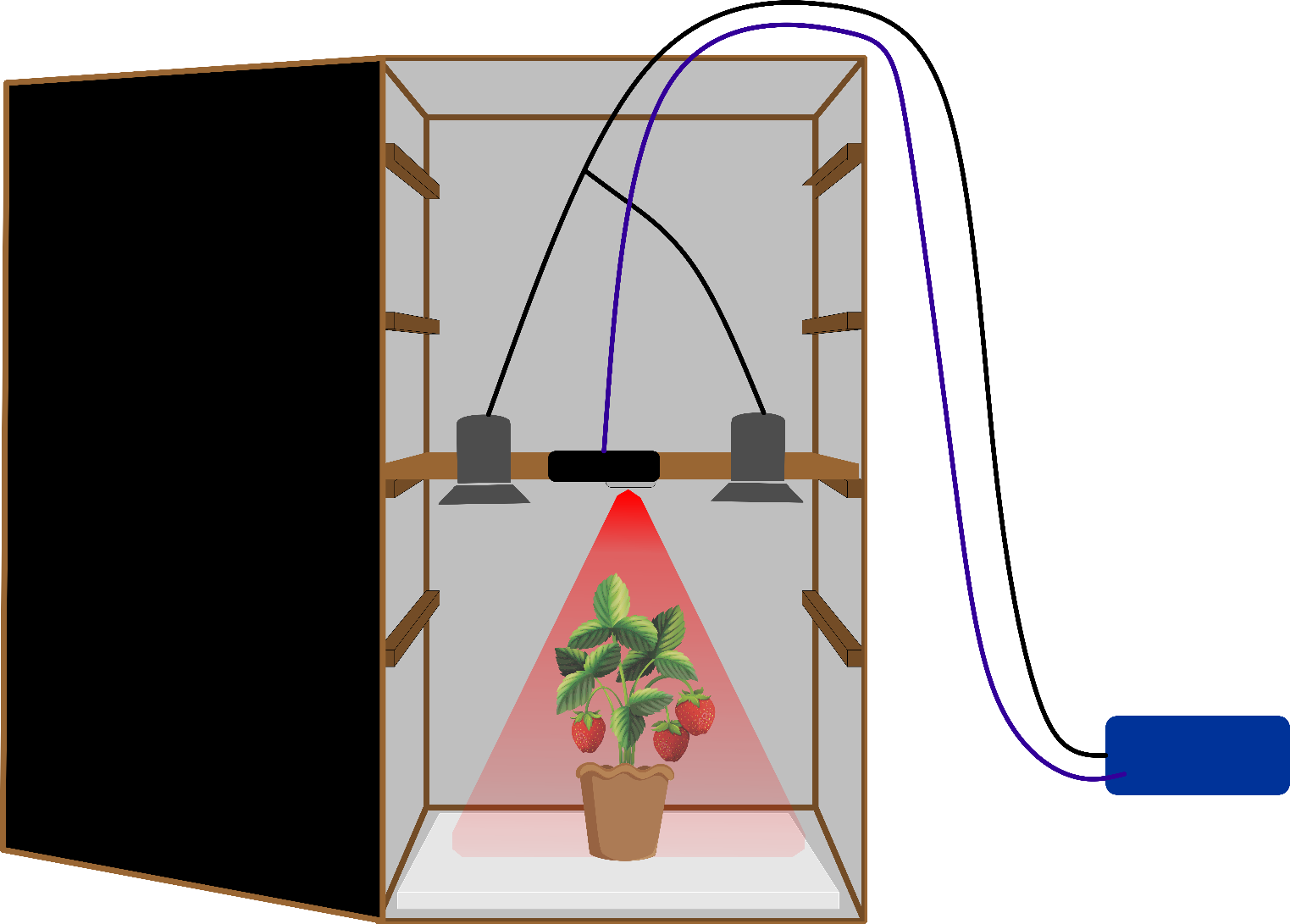
Propuesta:
Desarrollo de nuevos métodos de estimación de la biomasa usando termografía pulsadaResponsable(s):
Dr. Madain Pérez PatricioSede:
TuxtlaContacto:
madain.pp@tuxtla.tecnm.mxLa estimación de la biomasa es una herramienta importante en la toma de decisiones en varias áreas de trabajo. Se obtienen resultados aceptables cuando se realiza de forma local pero es una tarea que consume mucho tiempo y recursos. Se propone el uso de la termografía pulsada (TP) para esta tarea, dando como resultado nuevos métodos de estimación de la biomasa obteniendo información con una mayor exactitud que aquellos descritos en la literatura y que serán métodos no destructivos. Se espera que los métodos desarrollados impliquen ecuaciones matemáticas simples que puedan ser resueltas usando métodos sencillos y que además sean implementados en arquitecturas de cómputo embebidas con potencia de cálculo reducidas. Esto dará origen a la implementación de estas tecnologías en dispositivos portátiles que faciliten su uso en regiones de difícil acceso. El uso de los métodos desarrollados podrá ser utilizado en diferentes cultivos de la región, tales como el limón, el café, papaya, plátano, etc.
Download Full Proposal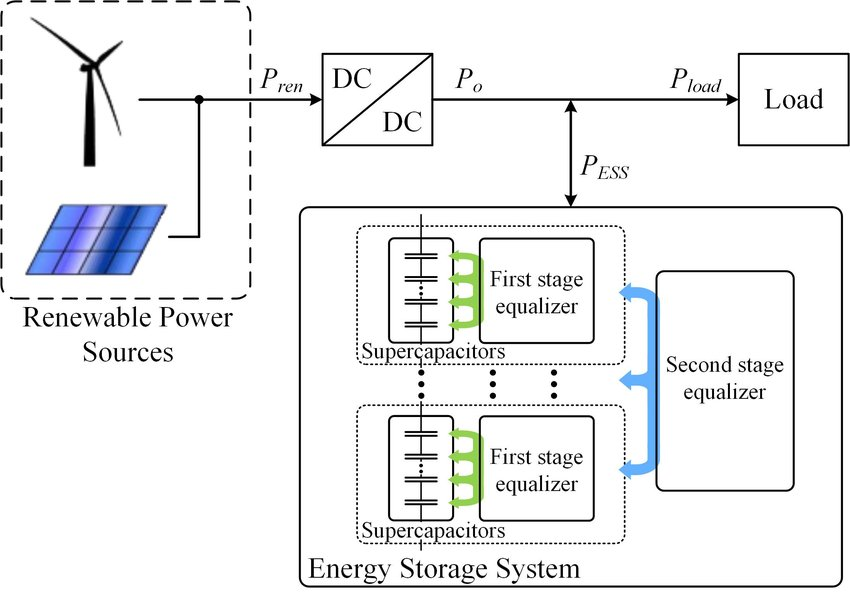
Propuesta:
: Sistema de almacenamiento de energía con supercapacitores para soporte de sistemas fotovoltaicosResponsable(s):
Dr. José Antonio Hoyo MontañoSede:
IT HermosilloContacto:
jose.hoyom@hermosillo.tecnm.mxLa alta dependencia de las energías renovables respecto a las condiciones del clima (temperatura, irradiancia, sombreados parciales y humedad), su intermitencia y fluctuación, hacen difícil el mantener una salida estable, afectando el desempeño de las redes eléctricas en términos de frecuencia, voltaje y calidad de la energía. Estos inconvenientes abren la oportunidad de desarrollar Sistemas de Almacenamiento de Energía (ESS por sus siglas en inglés de Energy Storage System), que garanticen en cierto grado al confiabilidad y estabilidad de la red eléctrica. Varios de estos ESS basados en una sola tecnología de almacenamiento tratan el problema de fluctuación y/o intermitencia, aun cuando estas variaciones puedan tener diferentes duraciones de tiempo, desde los de muy corta duración (minutos o menos), hasta los de muy larga duración (horas o días). Existen diversas tecnologías para el almacenamiento de energía dependiendo de la naturaleza del proceso de almacenamiento: • Química (celdas de combustible). • Electroquímica (baterías). • Electroestática (supercapacitores). • Electromecánica (volantines, aire comprimido). • Electromagnética (superconductores). El uso de ESS con baterías proporciona una alta densidad de energía, un tiempo de vida limitado, baja densidad de potencia, lo que proporciona bajas tazas de carga/descarga, y tienen un bajo costo por watt. Los supercapacitores usados en ESS proporcionan más densidad de potencia, bajas densidades de energía, mayor tiempo de vida y cargas más rápidas. Dado que los supercapacitores son dispositivos de bajo voltaje (no mayor a 3v), tienen limitaciones para proporcionar la potencia requerida en aplicaciones de altas corrientes, por lo que es necesario hacer conexiones en serie para incrementar el voltaje de salida. Este tipo de arreglo requiere una topología modular para cargar a los supercapacitores de manera individual.
Download Full ProposalNuestra Ubicación |
Contáctanos |
Siguenos en nuestras Redes Sociales |
|---|---|---|
|
Carretera Panamericana Km. 1080, C.P. 29050, Apartado Postal: 599 |
Copyright © Posgrados en Ciencias en Ingeniería Instituto Tecnológico de Tuxtla Gutiérrez All Rights Reserved